검색결과 리스트
Computer에 해당되는 글 28건
- 2017.05.13 [Android] 반투명 액티비티
- 2017.05.02 [Stereo Vision] 스테레오 매칭
- 2017.04.12 [Android] 피파온라인 선수 검색 예제
- 2017.03.30 [JSP] 테니스 토너먼트 웹
- 2017.03.30 [Processing] particle/interaction project
- 2017.03.30 [opencv] Simple lane detection
- 2017.03.30 [opencv] Line matching
- 2017.03.29 [Line feature descriptor] LBD descriptor
글
Manifest.xml 파일에서 반투명을 적용하고 싶은 액티비티를 아래와 같이 수정
1 2 | <activity android:name=".marryPopup" android:theme="@style/Theme.AppCompat.Translucent"></activity> | cs |
.java 파일 수정
1 2 3 4 5 6 7 8 9 10 | protected void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); WindowManager.LayoutParams layoutParams = new WindowManager.LayoutParams(); layoutParams.flags = WindowManager.LayoutParams.FLAG_DIM_BEHIND; layoutParams.dimAmount = 0.6f; // 투명도 0 ~ 1 getWindow().setAttributes(layoutParams); setContentView(R.layout.activity_marry_popup); } | cs |
'Computer > Coding' 카테고리의 다른 글
| [Tensorflow] c++에서 이용가능한 그래프 만들기 (0) | 2018.05.15 |
|---|---|
| [Tensorflow] Ubuntu 환경 c++ + 텐서플로 + opencv 빌드 (0) | 2018.05.15 |
| [Android] 피파온라인 선수 검색 예제 (0) | 2017.04.12 |
| [JSP] 테니스 토너먼트 웹 (0) | 2017.03.30 |
| [Processing] particle/interaction project (0) | 2017.03.30 |
설정
트랙백
댓글
글
◎ 스테레오 매칭
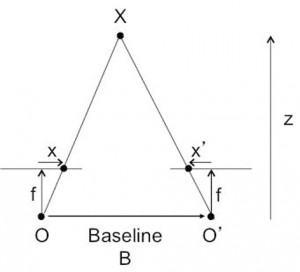
○ 서로 다른 시점의 두 장의 이미지로 부터 거리 정보를 추출.
○ 양쪽 이미지 사이의 대응되는 점이 차이나는 정도를 통해 거리 정보를 얻을 수 있음.
◎ 에피폴라 제약조건 (epipolar constraint)
○ 매칭 시간 감소.
○ 2d 이미지 대상의 검색을 1d 라인상의 검색으로 간소화.

◎ 매칭 (Matching)
○ 이미지 레티피케이션 (Image Rectification)

○ 에피폴라 라인을 따라 매칭

'Computer > Notion' 카테고리의 다른 글
| MQTT 프로토콜 정리 (0) | 2022.01.04 |
|---|---|
| 객체 검출(Detection) / 인식(Recognition) / 추적(Tracking) (1) | 2020.12.30 |
| [Vehicle detection] CCTV 자동차 검출 (0) | 2018.09.04 |
| [Line feature descriptor] LBD descriptor (0) | 2017.03.29 |
설정
트랙백
댓글
글
잘 쓰던 피파온라인 정보 앱들이 개발자분들의 개인 사정으로 업데이트가 끊기면서
에라.. 없으면 내가 만들어 써야겠다 다짐하고 잠깐 작업을 했더니 새로운 앱이 나와 처박아버렸다.
혹시 필요하신분은 가져다 쓰시길..

위 캡쳐는 실행 화면.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 | public class MainActivity extends AppCompatActivity { private String htmlPageUrl = "http://fifaonline3.nexon.com/datacenter/player/list.aspx?strpynm="; private String search; private TextView textviewHtmlDocument; private String htmlContentInStringFormat; private String searchResult01 = "", searchResult02 = "", searchResult03 = "", searchResult04 = "", searchResult05 = "", searchResult06 = "", searchResult07 = "", searchResult08 = "", searchResult09 = "", searchResult10 = "", searchResult11 = ""; final ArrayList<String> items = new ArrayList<String>() ; @Override protected void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); setContentView(R.layout.activity_main); final ArrayAdapter adapter = new ArrayAdapter(this, android.R.layout.simple_list_item_1, items); final ListView listview = (ListView) findViewById(R.id.listView) ; listview.setAdapter(adapter) ; textviewHtmlDocument = (TextView)findViewById(R.id.textView); textviewHtmlDocument.setMovementMethod(new ScrollingMovementMethod()); Button htmlTitleButton = (Button)findViewById(R.id.button); final EditText editText=(EditText)findViewById(R.id.editText); htmlTitleButton.setOnClickListener(new View.OnClickListener() { @Override public void onClick(View v) { String playername = editText.getText().toString(); search = htmlPageUrl + playername; JsoupAsyncTask jsoupAsyncTask = new JsoupAsyncTask(); jsoupAsyncTask.execute(); try {Thread.sleep(3000);} catch (InterruptedException e) { } adapter.notifyDataSetChanged(); } }); } private class JsoupAsyncTask extends AsyncTask<Void, Void, Void> { @Override protected void onPreExecute() { super.onPreExecute(); } @Override protected Void doInBackground(Void... params) { try { Document doc = Jsoup.connect(search).get(); Elements links = doc.select(".name"); for (Element link : links) { htmlContentInStringFormat += (link.attr("abs:href") + "("+link.text().trim() + ")\n"); Elements linkelements = link.getElementsByTag("td"); int elesize = linkelements.size(); } } catch (IOException e) { e.printStackTrace(); } return null; } @Override protected void onPostExecute(Void result) { textviewHtmlDocument.setText("검색결과"); items.clear(); textviewHtmlDocument.setText(htmlContentInStringFormat); } } } | cs |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 | <?xml version="1.0" encoding="utf-8"?> <RelativeLayout xmlns:android="http://schemas.android.com/apk/res/android" xmlns:tools="http://schemas.android.com/tools" android:id="@+id/activity_main" android:layout_width="match_parent" android:layout_height="match_parent" android:paddingBottom="@dimen/activity_vertical_margin" android:paddingLeft="@dimen/activity_horizontal_margin" android:paddingRight="@dimen/activity_horizontal_margin" android:paddingTop="@dimen/activity_vertical_margin" tools:context="com.example.vrlab.fifa3simulation.MainActivity"> <Button android:layout_width="wrap_content" android:layout_height="wrap_content" android:text="Search" android:id="@+id/button" android:layout_alignParentTop="true" android:layout_alignParentEnd="true" /> <EditText android:layout_width="wrap_content" android:layout_height="wrap_content" android:inputType="textPersonName" android:text="" android:ems="10" android:layout_alignBottom="@+id/button" android:layout_alignParentStart="true" android:id="@+id/editText" android:layout_toStartOf="@+id/button" /> <TextView android:text="TextView" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_below="@+id/editText" android:layout_centerHorizontal="true" android:id="@+id/textView" /> <ListView android:layout_width="match_parent" android:layout_height="match_parent" android:id="@+id/listView" android:layout_centerHorizontal="true" android:layout_below="@+id/textView" /> </RelativeLayout> | cs |
'Computer > Coding' 카테고리의 다른 글
| [Tensorflow] Ubuntu 환경 c++ + 텐서플로 + opencv 빌드 (0) | 2018.05.15 |
|---|---|
| [Android] 반투명 액티비티 (0) | 2017.05.13 |
| [JSP] 테니스 토너먼트 웹 (0) | 2017.03.30 |
| [Processing] particle/interaction project (0) | 2017.03.30 |
| [opencv] Simple lane detection (0) | 2017.03.30 |
설정
트랙백
댓글
글
◎ 개발환경
○ JSP, CSS, mysql
○ 소스코드 : https://github.com/IkHyunJo/tennis
◎ 구현결과
































'Computer > Coding' 카테고리의 다른 글
| [Android] 반투명 액티비티 (0) | 2017.05.13 |
|---|---|
| [Android] 피파온라인 선수 검색 예제 (0) | 2017.04.12 |
| [Processing] particle/interaction project (0) | 2017.03.30 |
| [opencv] Simple lane detection (0) | 2017.03.30 |
| [opencv] Line matching (0) | 2017.03.30 |
설정
트랙백
댓글
글
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 | import processing.video.*; int stat; int btn = 0; int btn2 = 0; int btn3 = 0; float nbsum = 0; float pbsum = 0; float nbsum2 = 0; float pbsum2 = 0; float nbsum3 = 0; float pbsum3 = 0; ParticleSystem ps; Capture video; PImage img, dback; double sum4; void setup() { size(600, 480); video = new Capture(this, 640, 480, 30); video.start(); img = createImage(640, 480, RGB); dback = createImage(640, 480, GRAY); background(0); ps = new ParticleSystem(new PVector(width/2, -1500)); } void draw() { if(video.available()){ video.read(); } video.loadPixels(); img.loadPixels(); for(int x = 50; x < 630; x++){ for(int y = 0; y < 480; y++){ img.pixels[y*img.width +(640-x)] = video.pixels[y*img.width + x]; } } img.filter(GRAY); checkInterection2(); dithering(); checkInterection(); if(btn == 1){ ps.addParticle(); ps.run(); } image(img, 0, 480); //rect(300, 0, 20, 20); } void checkInterection(){ img.loadPixels(); nbsum = 0; for(int dx = 0; dx < 20; dx++){ for(int dy = 0; dy < 20; dy++){ nbsum = nbsum + brightness(img.pixels[(dy)*img.width + (500+dx)]); } } if(abs(nbsum - pbsum) > 6000){ if(btn == 0){btn = 1;} else if(btn == 1){btn = 0;} } //text("brightness difference : " + abs(nbsum - pbsum), 10, 480); pbsum = nbsum; } void checkInterection2(){ img.loadPixels(); nbsum2 = 0; for(int dx = 0; dx < 20; dx++){ for(int dy = 0; dy < 20; dy++){ nbsum2 = nbsum2 + brightness(img.pixels[(dy)*img.width + (100+dx)]); } } if(abs(nbsum2 - pbsum2) > 10000){ if(btn2 == 0){if(btn3==1){btn2 = 2;}else{btn2 = 1;}} else if(btn2 == 1){btn2 = 2;} else if(btn2 == 2){btn2 = 3;} else if(btn2 == 3){btn2 = 4;} else if(btn2 == 4){btn2 = 0;} } //text("brightness difference : " + abs(nbsum2 - pbsum2), 10, 480); pbsum2 = nbsum2; } void backbtn(){ img.loadPixels(); nbsum3 = 0; for(int dx = 0; dx < 20; dx++){ for(int dy = 0; dy < 20; dy++){ nbsum3 = nbsum3 + brightness(img.pixels[(dy)*img.width + (500+dx)]); } } if(abs(nbsum3 - pbsum3) > 10000){ if(btn3 == 0){btn3 = 1;} else if(btn3 == 1){btn3 = 2;} else if(btn3 == 2){btn3 = 3;} else if(btn3 == 3){btn3 = 4;} else if(btn3 == 4){btn3 = 0;} } text("brightness difference : " + abs(nbsum3 - pbsum3), 10, 480); pbsum3 = nbsum3; } void dithering(){ stat = 1; img.loadPixels(); if(btn2 == 0){background(0);} else if(btn2 == 1){background(#25DBD6);} else if(btn2 == 2){background(#0130F7);} else if(btn2 == 3){background(#C03A1A);} else if(btn2 == 4){background(#8A3C86);} for(int x = 5; x < 635; x+=10){ for(int y = 5; y < 475; y+=10){ sum4 = 0; for(int a = -5; a<5; a++){ for(int b = -5; b<5; b++){ sum4 = sum4 + brightness(img.pixels[(y+b)*img.width + (x+a)]); } } if (sum4 > 25000){ ellipse(x, y, 10, 10); noStroke(); }else if ((20000<sum4)&&(sum4<25000)){ ellipse(x, y, 8, 8); noStroke(); }else if ((15000<sum4)&&(sum4<20000)){ ellipse(x, y, 6, 6); noStroke(); }else if ((10000<sum4)&&(sum4<15000)){ ellipse(x, y, 4, 4); noStroke(); }else if ((5000<sum4)&&(sum4<10000)){ ellipse(x, y, 2, 2); noStroke(); } if(btn2 == 0){ int crand = int(random(1,4)); if (crand == 1){fill(#DA2429);} else if (crand == 2){fill(#FECF08);} else if (crand == 3){fill(#3FC5E5);} else if (crand == 4){fill(#75C379);} } else if(btn2 == 1){fill(#DA2429);} else if(btn2 == 2){fill(#FECF08);} else if(btn2 == 3){fill(#3FC5E5);} else if(btn2 == 4){fill(#75C379);} } } } class ParticleSystem { ArrayList<Particle> particles; PVector origin; ParticleSystem(PVector position) { origin = position.copy(); particles = new ArrayList<Particle>(); } void addParticle() { particles.add(new Particle(origin)); } void run() { for (int i = particles.size()-1; i >= 0; i--) { Particle p = particles.get(i); p.run(); if (p.isDead()) { particles.remove(i); } } } } class Particle { PVector position; PVector velocity; PVector acceleration; float lifespan; Particle(PVector l) { acceleration = new PVector(0, 0.05); velocity = new PVector(random(-1, 1), random(-2, 0)); position = l.copy(); lifespan = 255.0; } void run() { update(); display(); } void update() { velocity.add(acceleration); position.add(velocity); lifespan -= 0.4; } void display() { //stroke(255, lifespan); noStroke(); int crand = int(random(1,4)); if (crand == 1){fill(#DA2429, lifespan);} else if (crand == 2){fill(#FECF08, lifespan);} else if (crand == 3){fill(#3FC5E5, lifespan);} else if (crand == 4){fill(#75C379, lifespan);} //fill(#854845, lifespan); //change color int rands = int(random(8,20)); ellipse(position.x, position.y, rands, rands); } boolean isDead() { if (lifespan < 0.0) { return true; } else { return false; } } } | cs |
<실행 영상>
'Computer > Coding' 카테고리의 다른 글
| [Android] 반투명 액티비티 (0) | 2017.05.13 |
|---|---|
| [Android] 피파온라인 선수 검색 예제 (0) | 2017.04.12 |
| [JSP] 테니스 토너먼트 웹 (0) | 2017.03.30 |
| [opencv] Simple lane detection (0) | 2017.03.30 |
| [opencv] Line matching (0) | 2017.03.30 |
설정
트랙백
댓글
글
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 | #include <opencv\cv.h> #include <opencv\highgui.h> #include <iostream> #include <stdlib.h> #include <stdio.h> using namespace cv; using namespace std; Mat grad, src; Mat edges(600, 800, CV_8UC1); char name[100]; void main() { int gg = 0; while (1){ sprintf(name, "Testvideo/testvideo1/Left_%d.bmp", gg); Mat src = imread(name, 1); if (!src.data) break; // src 이미지 데이터가없으면 종료 edges = Scalar(0); //소벨 필터 Mat src_gray; Mat abs_grad_x, abs_grad_y; int scale = 1; int delta = 0; int ddepth = CV_16S; //이미지 로딩 GaussianBlur(src, src, Size(3, 3), 0, 0, BORDER_DEFAULT); cvtColor(src, src_gray, CV_RGB2GRAY); Mat grad_x, grad_y; /// Gradient X Sobel(src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT); convertScaleAbs(grad_x, abs_grad_x); /// Gradient Y Sobel(src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT); convertScaleAbs(grad_y, abs_grad_y); addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad); //오른쪽 엣지 찾기 vector<Point2i> rPoints; for (int y = 430; y < grad.rows; y = y + 5) { bool i = false; uchar* data = grad.ptr<uchar>(y); for (int x = 300; x < grad.cols; x++) { if (data[x] > 100 && i == false) { rectangle(edges, Point(x, y), Point(x - 2, y - 2), Scalar(255, 0, 0), 2); rPoints.push_back(Point(x, y)); i = true; } } } //왼쪽 엣지 찾기 vector<Point2i> lPoints; for (int y = 380; y < grad.rows; y = y + 5) { bool i = false; uchar* data = grad.ptr<uchar>(y); for (int x = 300; x > 0; x--) { if (data[x] > 100 && i == false) { rectangle(edges, Point(x, y), Point(x - 2, y - 2), Scalar(255, 0, 0), 2); lPoints.push_back(Point(x, y)); i = true; } } } // 라인 찾기 vector<Vec2f> lines; HoughLines(edges, lines, 1, CV_PI / 180, 150, 0, 0); int r, l; l = 0, r = 0; // 라인 그리기 for (size_t i = 0; i < lines.size(); i++) { float rho = lines[i][0], theta = lines[i][1]; Point pt1, pt2; double a = cos(theta), b = sin(theta); if ((a / b) < 0) { r = i; } else { l = i; cout << l << endl; } } float rho = lines[r][0], theta = lines[r][1]; Point pt1, pt2; double a = cos(theta), b = sin(theta); double x0 = a*rho, y0 = b*rho; pt1.x = cvRound(x0 + 1000 * (-b)); pt1.y = cvRound(y0 + 1000 * (a)); pt2.x = cvRound(x0 - 1000 * (-b)); pt2.y = cvRound(y0 - 1000 * (a)); float rho2 = lines[l][0], theta2 = lines[l][1]; Point pt3, pt4; double a2 = cos(theta2), b2 = sin(theta2); double x02 = a2*rho2, y02 = b2*rho2; pt3.x = cvRound(x02 + 1000 * (-b2)); pt3.y = cvRound(y02 + 1000 * (a2)); pt4.x = cvRound(x02 - 1000 * (-b2)); pt4.y = cvRound(y02 - 1000 * (a2)); double t; double s; double under = (pt4.y - pt3.y)*(pt2.x - pt1.x) - (pt4.x - pt3.x)*(pt2.y - pt1.y); double _t = (pt4.x - pt3.x)*(pt1.y - pt3.y) - (pt4.y - pt3.y)*(pt1.x - pt3.x); double _s = (pt2.x - pt1.x)*(pt1.y - pt3.y) - (pt4.y - pt1.y)*(pt1.x - pt3.x); t = _t / under; s = _s / under; double cx = pt1.x + t * (double)(pt2.x - pt1.x); double cy = pt1.y + t * (double)(pt2.y - pt1.y); Point cp; cp.x = cx, cp.y = cy; line(src, pt2, cp, Scalar(0, 0, 255), 3, CV_AA); line(src, pt3, cp, Scalar(0, 0, 255), 3, CV_AA); rectangle(src, Point(cx, cy), Point(cx - 4, cy - 4), Scalar(255, 0, 0), 4); cv::namedWindow("Detected Lines with Hough"); cv::imshow("Detected Lines with Hough", src); gg++; waitKey(1); } } | cs |
<구현 결과 영상>

<구현 과정>
'Computer > Coding' 카테고리의 다른 글
| [Android] 반투명 액티비티 (0) | 2017.05.13 |
|---|---|
| [Android] 피파온라인 선수 검색 예제 (0) | 2017.04.12 |
| [JSP] 테니스 토너먼트 웹 (0) | 2017.03.30 |
| [Processing] particle/interaction project (0) | 2017.03.30 |
| [opencv] Line matching (0) | 2017.03.30 |
설정
트랙백
댓글
글
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 | #include <opencv2/line_descriptor.hpp> #include "opencv2/core/utility.hpp" #include <opencv2/imgproc.hpp> #include <opencv2/features2d.hpp> #include <opencv2/highgui.hpp> #include <iostream> using namespace cv; static const char* keys = { "{@image_path1 | | Image path 1 }" "{@image_path2 | | Image path 2 }" }; static void help() { std::cout << "\nThis example shows the functionalities of lines extraction " << "and descriptors computation furnished by BinaryDescriptor class\n" << "Please, run this sample using a command in the form\n" << "./example_line_descriptor_compute_descriptors <path_to_input_image 1>" << "<path_to_input_image 2>" << std::endl; } int main( int argc, char** argv ) { /* get parameters from comand line */ CommandLineParser parser( argc, argv, keys ); String image_path1 = parser.get<String>( 0 ); String image_path2 = parser.get<String>( 1 ); if( image_path1.empty() || image_path2.empty() ) { help(); return -1; } /* load image */ cv::Mat imageMat1 = imread( image_path1, 1 ); cv::Mat imageMat2 = imread( image_path2, 1 ); waitKey(); if( imageMat1.data == NULL || imageMat2.data == NULL ) { std::cout << "Error, images could not be loaded. Please, check their path" << std::endl; } /* create binary masks */ cv::Mat mask1 = Mat::ones( imageMat1.size(), CV_8UC1 ); cv::Mat mask2 = Mat::ones( imageMat2.size(), CV_8UC1 ); /* create a pointer to a BinaryDescriptor object with default parameters */ Ptr<BinaryDescriptor> bd = BinaryDescriptor::createBinaryDescriptor(); /* compute lines */ std::vector<KeyLine> keylines1, keylines2; bd->detect( imageMat1, keylines1, mask1 ); bd->detect( imageMat2, keylines2, mask2 ); /* compute descriptors */ cv::Mat descr1, descr2; bd->compute( imageMat1, keylines1, descr1 ); bd->compute( imageMat2, keylines2, descr2 ); /* create a BinaryDescriptorMatcher object */ Ptr<BinaryDescriptorMatcher> bdm = BinaryDescriptorMatcher::createBinaryDescriptorMatcher(); /* require match */ std::vector<DMatch> matches; bdm->match( descr1, descr2, matches ); /* plot matches */ cv::Mat outImg; std::vector<char> mask( matches.size(), 1 ); drawLineMatches( imageMat1, keylines1, imageMat2, keylines2, matches, outImg, Scalar::all( -1 ), Scalar::all( -1 ), mask, DrawLinesMatchesFlags::DEFAULT ); imshow( "Matches", outImg ); waitKey(); } | cs |
<출처 : http://docs.opencv.org/3.0-beta/modules/line_descriptor/doc/tutorial.html>
이미지1에서 세그먼트된 각각의 라인들에 대한 best match를 이미지2에서 한개씩 찾는다.
opencv에서는 LBD descriptor을 binary descriptor로 바꾸어 매칭을 실시한다.
이 외에 radius match나 knn match를 이용하려면 아래와 같이 수정하면 된다.
1 2 3 4 5 6 7 8 9 10 11 | /* prepare a structure to host matches */ std::vector<std::vector<DMatch> > matches; /* require knn match */ bdm->knnMatch( descr1, descr2, matches, 6 ); /* prepare a structure to host matches */ std::vector<std::vector<DMatch> > matches; /* compute matches */ bdm->radiusMatch( queries, matches, 30 ); | cs |
1 2 3 4 5 | std::vector<char> mask( vsize, 1 ); for(int i = 0; i < matches.size(); i++){ drawLineMatches( imageMat1, keylines1, imageMat2, keylines2, matches[i], outImg, Scalar::all( -1 ), Scalar::all( -1 ), mask, DrawLinesMatchesFlags::DEFAULT ); } | cs |
'Computer > Coding' 카테고리의 다른 글
| [Android] 반투명 액티비티 (0) | 2017.05.13 |
|---|---|
| [Android] 피파온라인 선수 검색 예제 (0) | 2017.04.12 |
| [JSP] 테니스 토너먼트 웹 (0) | 2017.03.30 |
| [Processing] particle/interaction project (0) | 2017.03.30 |
| [opencv] Simple lane detection (0) | 2017.03.30 |
설정
트랙백
댓글
글
◎ 라인 매칭이 필요한 이유
○ 기존의 매칭 방법의 대부분은 local points 혹은 region feature 기반.
○ 이러한 매칭 방법들은 텍스쳐가 낮은 장면에서 성능이 떨어지는 경향이 있음.
○ 하지만 이러한 장면들도 충분한 Line feature들을 포함 할 수 있음.
◎ 라인 매칭을 위한 3가지 방법
○ 각각의 Line에 대한 개별적인 매칭.
○ Line segment들의 그룹에 대한 매칭.
- 해당 방법의 경우는 대부분 작은 베이스라인을 가지는 스테레오 이미지 쌍을 위한 경우.
- 더 넓은 범위의 조건에서의 성능은 충분히 검증되지 않음.
○ Point correspondences를 이용한 라인 매칭.
- 텍스쳐가 낮은, 충분한 point feature가 없는 씬에서의 매칭을 위한 연구를 진행하므로 해당사항 없음.
◎ Line detection for LBD
○ Scale space에서 라인을 검출.
○ 원본 이미지는 옥타브 이미지 세트를 생성하기 위해 다운샘플링.
○ 원본이미지의 동일한 영역에서 모든 옥타브에서 검출된 라인들만 LineVec로 이용.

◎ Line Support Region 설정
○ Descriptor은 line support region (LSR)을 기반으로 계산됨.
○ LSR은 여러개의 band로 구성되며 band의 두께는 균일, 길이는 라인 세그먼트와 동일하며 평행함.

◎ LBD의 구조
○ LBD는 단순한 BD(band descriptor)의 나열로 구성.

○ BD(band descriptor)의 구조.


○ BDBj로 부터 구한 평균 벡터 Mj와 표준 편차 벡터 Sj를 이용하여 LBD 구성.

☞ Reference
- An efficient and robust line segment matching approach based on LBD descriptor and pairwise geometric consistency.
'Computer > Notion' 카테고리의 다른 글
| MQTT 프로토콜 정리 (0) | 2022.01.04 |
|---|---|
| 객체 검출(Detection) / 인식(Recognition) / 추적(Tracking) (1) | 2020.12.30 |
| [Vehicle detection] CCTV 자동차 검출 (0) | 2018.09.04 |
| [Stereo Vision] 스테레오 매칭 (0) | 2017.05.02 |

RECENT COMMENT